| MATLAB File Help: cv.ObjectnessBING | Index |
The Binarized normed gradients algorithm for Objectness
Implementation of BING for Objectness.
Many computer vision applications may benefit from understanding where humans focus given a scene. Other than cognitively understanding the way human perceive images and scenes, finding salient regions and objects in the images helps various tasks such as speeding up object detection, object recognition, object tracking and content-aware image editing.
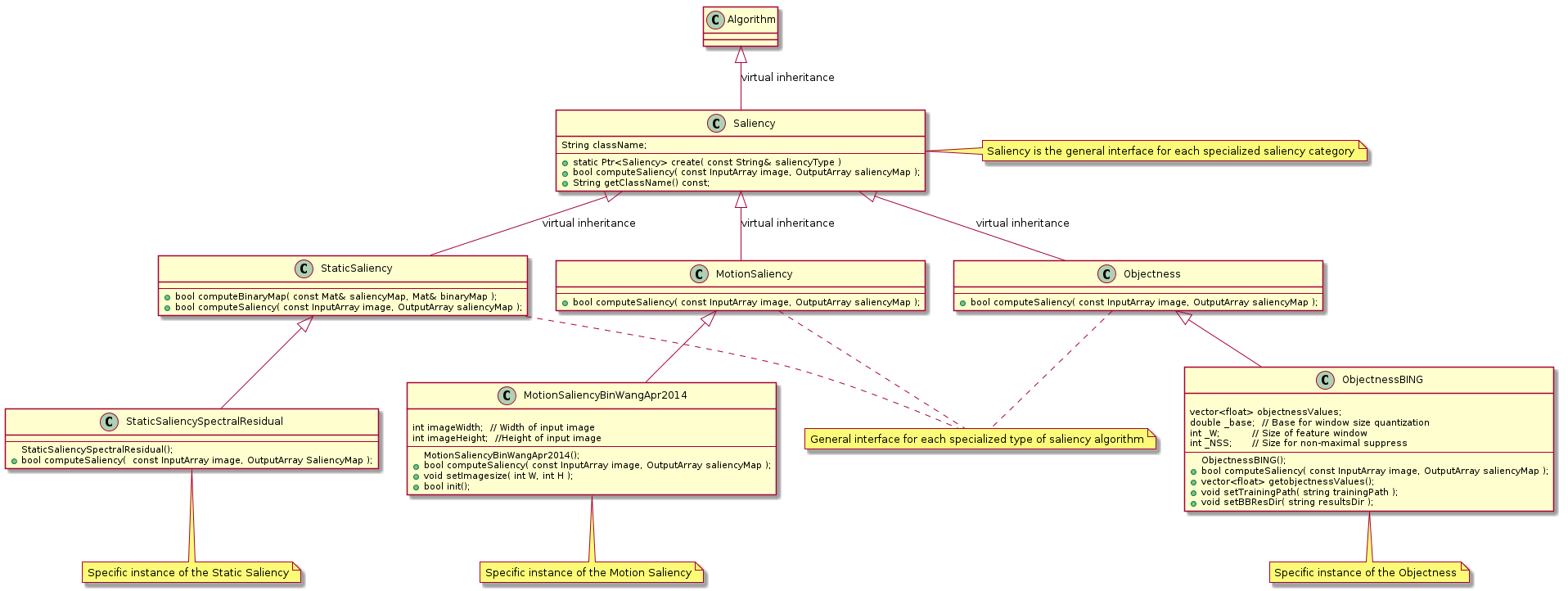
About the saliency, there is a rich literature but the development is very fragmented. The principal purpose of this API is to give a unique interface, a unique framework for use and plug sever saliency algorithms, also with very different nature and methodology, but they share the same purpose, organizing algorithms into three main categories:
Saliency UML diagram: <<http://docs.opencv.org/3.1.0/saliency.png>>
To see how API works, try tracker demo: computeSaliency_demo.m.
Objectness is usually represented as a value which reflects how likely an image window covers an object of any category. Algorithms belonging to this category, avoid making decisions early on, by proposing a small number of category-independent proposals, that are expected to cover all objects in an image. Being able to perceive objects before identifying them is closely related to bottom up visual attention (saliency).
Presently, the Binarized normed gradients algorithm [BING] has been implemented.
[BING]:
Cheng, Ming-Ming, et al. "BING: Binarized normed gradients for objectness estimation at 300fps". In IEEE CVPR, 2014.
| Superclasses | handle |
| Sealed | false |
| Construct on load | false |
| ObjectnessBING | Constructor, creates a specialized saliency algorithm of this type |
| Base | for window size quantization. default 2 |
| NSS | Size for non-maximal suppress. default 2 |
| W | As described in the paper: feature window size (W, W). default 8 |
| id | Object ID |
| addlistener | Add listener for event. | |
| clear | Clears the algorithm state | |
| computeSaliency | Compute the saliency | |
| delete | Destructor | |
| empty | Checks if detector object is empty. | |
| eq | == (EQ) Test handle equality. | |
| findobj | Find objects matching specified conditions. | |
| findprop | Find property of MATLAB handle object. | |
| ge | >= (GE) Greater than or equal relation for handles. | |
| getClassName | Get the name of the specific saliency type | |
| getDefaultName | Returns the algorithm string identifier | |
| getObjectnessValues | Return the list of the rectangles' objectness value | |
| gt | > (GT) Greater than relation for handles. | |
| Sealed | isvalid | Test handle validity. |
| le | <= (LE) Less than or equal relation for handles. | |
| load | Loads algorithm from a file or a string | |
| lt | < (LT) Less than relation for handles. | |
| ne | ~= (NE) Not equal relation for handles. | |
| notify | Notify listeners of event. | |
| save | Saves the algorithm parameters to a file | |
| setBBResDir | This is a utility function that allows to set an arbitrary path in which the algorithm will save the optional results | |
| setTrainingPath | This is a utility function that allows to set the correct path from which the algorithm will load the trained model |
{kind=link}